010-82967128
sales@cnmicro.com.cn

13911564578(銷售)18601135929(技術)
010-82967128
sales@cnmicro.com.cn
13911564578(銷售)18601135929(技術)
航天工業需要每架飛機鉆成千上萬個洞,這已經不是什么秘密了。然而,在過去幾年里,工業機器人鉆孔幫助降低了制造成本,提高了生產率、可靠性和準確性。秘密在于如何使用機器人來實現這種程度的自動化。
我們參與了同樣的自動化鉆孔技術,創造了一件驚人的藝術品。自動機器人鉆孔現在可以在藝術和數字藝術項目中找到。這是Neoset design工作室為藝術家羅伯特·隆戈(Robert Longo)制作的一件藝術品。在這篇文章中,我們將展示一些用于實現高水平自動化機器人鉆井的步驟。

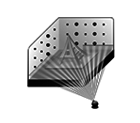
建造了一個定制的自動鉆孔系統,創建了一個名為“死亡之星2018”的結構,由藝術家羅伯特·隆戈(Robert Longo)設計。
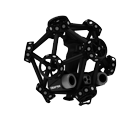
這件藝術品是一個懸掛的球體,上面有4萬個拋光銅彈殼,代表著過去25年美國大規模槍擊事件中死亡人數的增加。為了支持減少槍支暴力的努力,死亡之星II銷售所得的20%將捐贈給每個城鎮,用于槍支安全。

該作品由Neoset Designs的制作工作室制作。通過使用的機器人鉆孔技術,他們在不到兩周的時間里就能在0.150毫米的公差范圍內鉆出40000個孔。
僅僅打一個洞很容易。然而,快速準確地鉆孔是一個挑戰。主要的挑戰是鉆在正確的位置,保持所需的公差,并確保沒有浪費時間。
機器人可以幫助加速這一過程,這是一種性價比高的解決方案。然而,眾所周知,機器人是不準確的。該系統包括一個KUKA機器人,市場上的KUKA機器人,一個加工主軸和一個WEISS轉盤。Creaform C-Track測量系統也被用來達到預期的精度水平。使用RoboDK軟件進行標
定和離線編程。將機器人校準到0.150毫米以下是可能的,這是放置40000個孔所需要的公差。

說到工業機器人,對Neoset的設計來說,沒有什么挑戰是足夠大的。他們聚集了合適的團隊和設備來建造這幅獨特的藝術品。為了建造這個1噸重的球體,他必須把球體分成兩半。每個半圓都是由鑄鋼制成的。這對于機器人的鉆進過程非常重要,因為它使機器人的加工和鉆進更加穩定。在鉆孔之前,每個半球體都要經過加工,以獲得一個球形表面。內部結構和工字鋼電樞由普羅普托集團設計。一位前NASA工程師幫助Neoset的團隊創建了一個點列表,用來描述3D空間中每個子彈(洞)的位置。使用Matlab中創建的自定義算法確保所有子彈的孔間距保持一致。為此還專門設計了一種鉆孔工具,以減少振動。該工具的工作原理類似于安裝在機器人法蘭上的微型三軸數控機床。


Neoset還使用RoboDK軟件對KUKA Titan機器人進行了標定,實現了自適應機器人控制,鉆出40000個點(孔的坐標)。Python腳本和機器人驅動程序使RoboDK中的機器人實時補償成為可能。這意味著在機器人開始鉆削周期之前,通過CREAFORM測量系統對精度進行驗證。如果精度不夠好,則使用C-Track 3D測量(位置和方向補償)對機器人的位置進行校正。這種補償應用于鉆每孔之前,以獲得精度超過0.100毫米。
CREAFORM很榮幸能夠直接參與Neoset的團隊,使用RoboDK和Python API構建這個獨特的鉆井系統。